现场做声学成像时,最让人犹豫的往往不是“没有热点”,而是“这个热点到底是不是真的”。你明明在屏幕上看到了明显的声源聚集区,但换个角度再看,热点位置又变了;或者钢结构背后、阀门侧面、管道边缘突然冒出一个很亮的区域,看起来像泄漏,实际却只是反射、伪影或环境噪声带来的声学成像误报。
这也是很多现场工程师第一次使用声学相机时最容易踩的坑。声学成像本身并没有“看错”,问题通常出在对图像来源的解释上。真正关键的不是“图上有没有热点”,而是现场该如何判断它到底是真泄漏,还是假热点。只要把误报、伪影和反射区分清楚,再建立一套固定的排查动作,就能明显降低误判。
看到热点,不等于找到真故障源。 真正重要的,是把真实故障源和假热点尽快分开。
什么叫“声学成像误报”?先把三个概念分开
在现场沟通里,“误报”常常被混着用,但从排查动作上看,至少要先分清下面三类:
- 误报:图上出现了看似异常的热点,但它并不对应目标故障源。现场通常表现为看起来像泄漏或异响点,复核后却不成立。
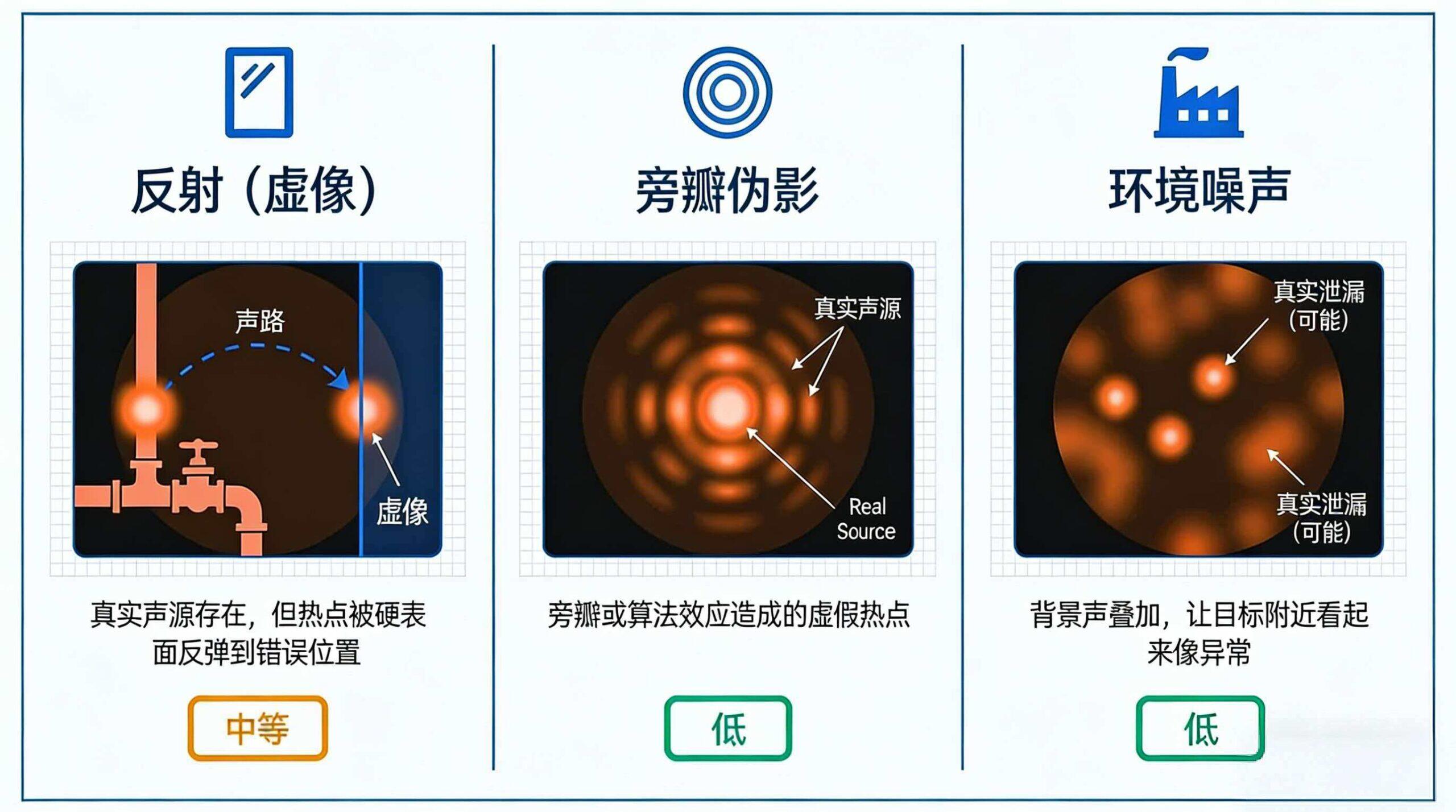
- 反射:真实声源存在,但声音打到墙面、钢梁、柜体或地面后反弹,导致热点出现在错误位置。它往往贴着硬表面,换观察角度后位置明显漂移。
- 伪影:由波束形成算法、阵列边界效应或旁瓣造成的虚假成像结构。常见表现是热点形状异常、重复出现,或者与真实源呈镜像、环状分布。
从使用角度讲,反射和伪影都可以表现为误报;而你真正要做的,是判断它属于哪一类,再决定下一步验证动作。
三类最常见的声学成像误报来源
1. 反射:真实声源存在,但热点位置被“弹开了”
这是工业现场里最常见的一类误判。压缩空气泄漏、阀门内漏、轴承异常声,都会在金属表面、混凝土墙面、玻璃或设备柜体上发生反射。于是你在图上看到的热点,并不一定落在真正的泄漏点上,而可能出现在它对面的钢梁、侧面的壳体,甚至地面上。
如果你在巡检压缩空气系统,屏幕上刚好在一根钢支撑梁上看见明显热点,第一反应不应该是“就是这里漏了”,而应该先问:附近有没有能够把超声反弹过来的硬表面?

反射型误报通常会呈现出几个比较稳定的信号:
- 热点靠近大面积硬质表面。
- 换一个站位后,热点会随视角变化而偏移。
- 做三角定位时,多条观察方向无法稳定交汇在同一点。
2. 伪影:算法给了你一个“看起来像真的”图形
第二类问题来自成像算法本身。声学相机依靠麦克风阵列与波束形成算法重建声源方向,阵列并不是无限大,算法也不是在任何频段都同样理想。因此在某些角度、频率或目标距离下,会出现旁瓣、拖尾、镜像点或不合理的扩散区,这些都属于声学成像伪影。
这类情况在高反差场景里更容易出现,例如真实泄漏点很强,但附近背景又复杂,结果图像上除了主热点外,还出现了几个相对较弱却看起来“有模有样”的次级热点。它们不是完全随机的噪点,却也不一定是真实故障源。
伪影通常有几个明显特点:
- 热点形状不自然,像拖尾、影分身或对称重复。
- 不同频段下变化特别剧烈。
- 收紧 ROI 或调整聚焦参数后,次级热点显著衰减甚至消失。
3. 环境噪声干扰:你看到的是现场背景,不是目标故障
第三类来源不是反射,也不是算法缺陷,而是现场本来就很吵。风声、蒸汽扰动、多个设备同时运行、气流冲击边角产生的宽带噪声,都可能在目标附近形成“假热点”。这类情况在开放厂房、管廊和多设备叠加运行的区域尤其常见。
环境噪声干扰的麻烦之处在于,它往往不是完全假的,而是“确实有声源,但不是你要找的那一个”。如果没有结合频谱、听回放或过程工况一起判断,就很容易把背景噪声当作故障点。
现场怎么判断是真问题还是假热点?用这四步
相比追求一次看准,更可靠的方法是建立固定排查流程。下面这四步适合大部分压缩空气泄漏、阀门内漏和设备异响场景。
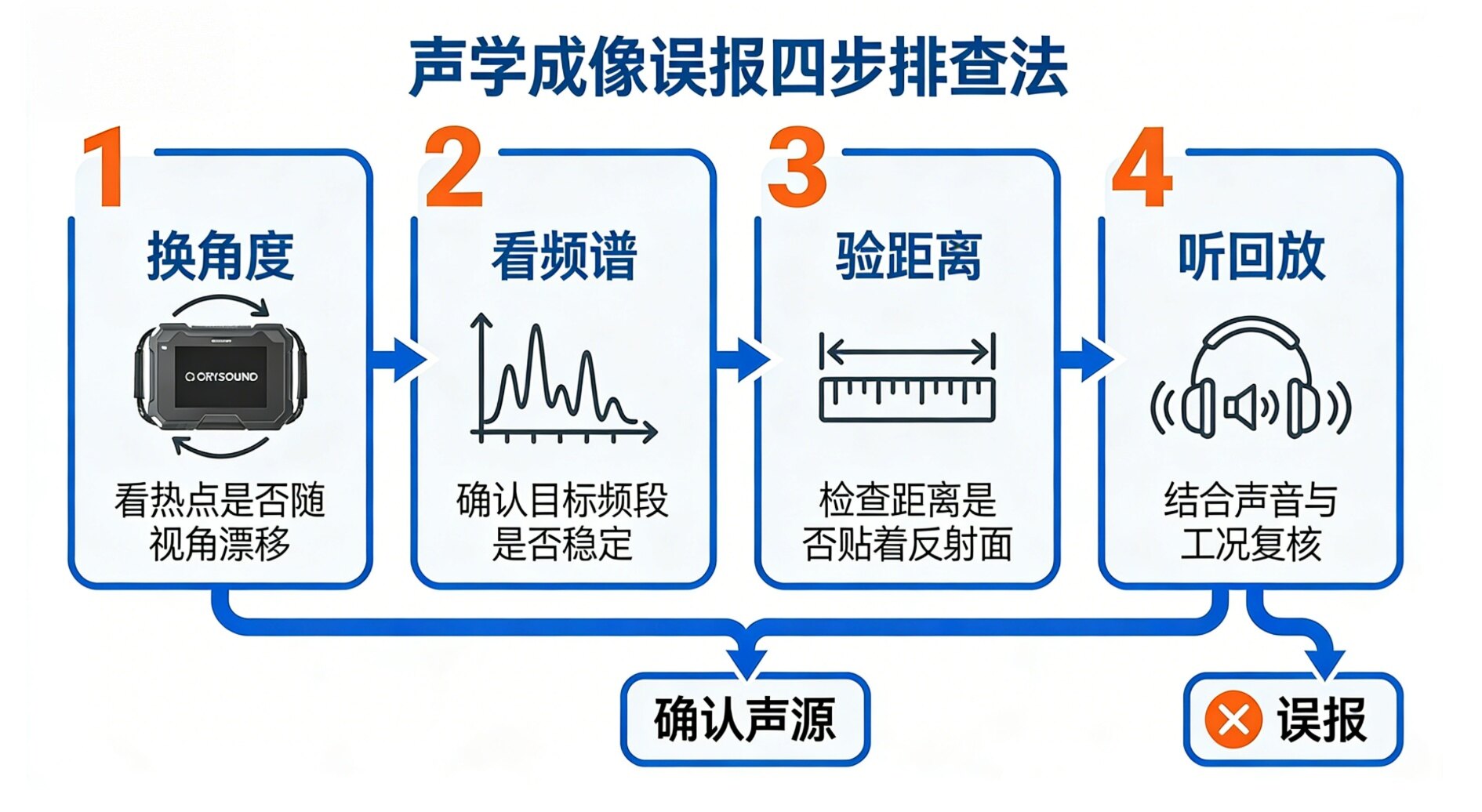
- 换角度再看一次。 不要站在同一个位置下结论。横向移动、抬高视角或绕到侧面复拍,观察热点是否稳定留在同一物理位置。真源通常会更稳定,反射热点则更容易漂移。
- 看频谱,而不只看彩图。 如果仪器支持频段筛选,先看目标频段是否集中,再看切换频带后热点是否仍然存在。真实泄漏往往在特定超声频段更稳定,环境噪声和伪影则更容易随频段变化而大幅波动。
- 验证距离和几何关系。 观察热点与设备边缘、墙面、钢结构的位置关系。如果热点总是贴着反射面,而不是落在可疑接头、法兰、阀体或裂纹附近,就要优先怀疑反射。
- 听回放或结合其他信号复核。 能听回放就听回放,能结合工艺状态、超声数值、压力变化或人工复检就一起做。图像只是入口,不应成为唯一证据。
三种常用方法,能明显减少声学成像误判
1. 不要只拍“正面图”,要做简单三角定位
如果同一个热点从多个观察角度都能回指到同一位置,可信度会高很多。反过来,如果你从三个方向观察,三条判断方向始终交不拢,那多半不是稳定真源,而是反射或复杂声场造成的假象。
在压缩空气系统排查中,这个动作尤其有效。你也可以结合这篇中文案例了解阀门泄漏场景下的定位逻辑:阀门泄漏检测案例。
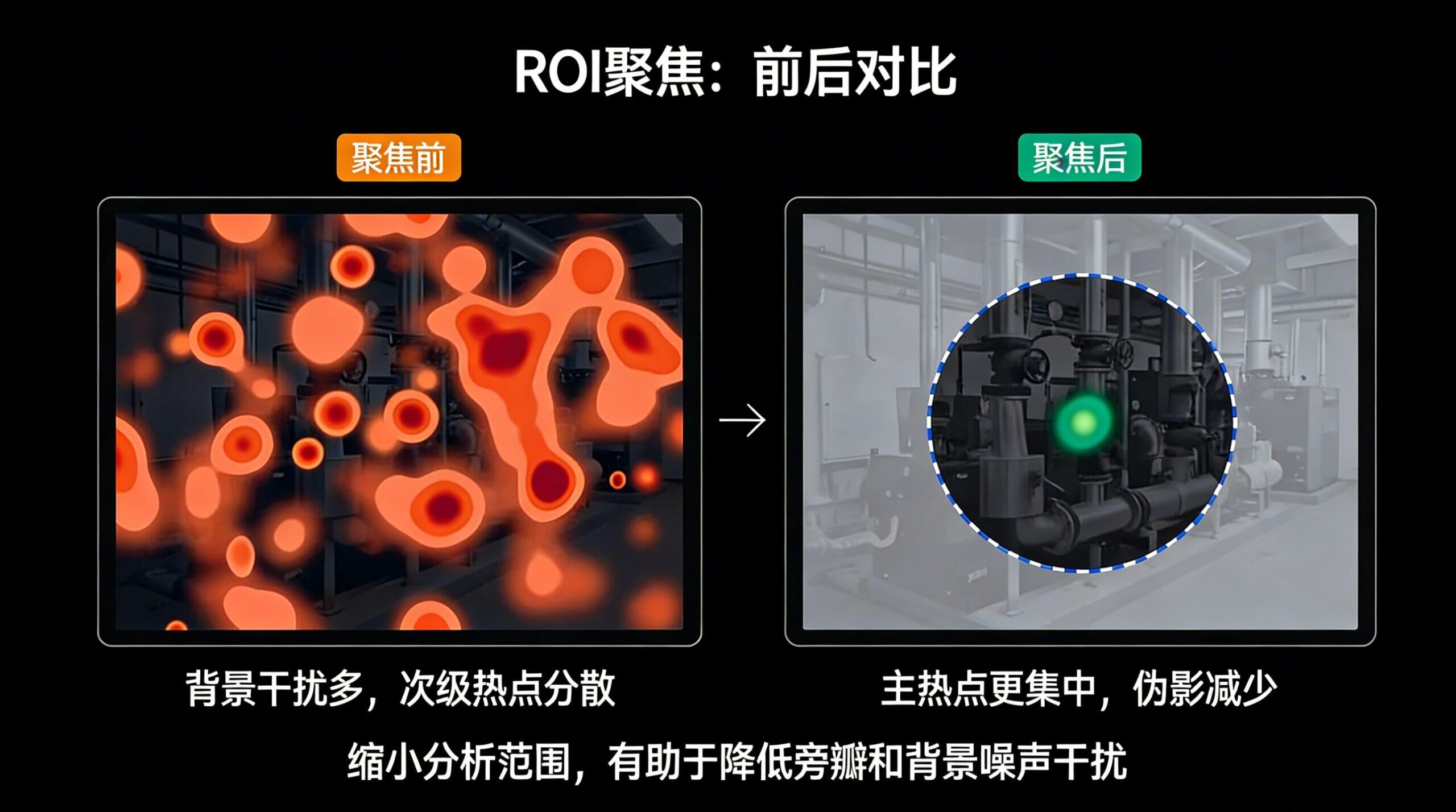
2. 收紧 ROI,降低旁瓣和背景干扰
如果画面范围过大,算法会把更多无关区域纳入计算,旁瓣和背景噪声更容易被“显示出来”。适当收紧 ROI、只保留目标设备区域,再重新聚焦,常常能把伪影压下去,让主热点更清楚。
3. 把声学图像和工况判断绑在一起
声学相机不是脱离场景独立工作的。做压缩空气巡检时,要看产线是否在放气;做阀门内漏检查时,要看上游下游压差;做开放式设备巡检时,要注意风噪、蒸汽、排气冲击等背景源。图像、频谱和工况三者一致时,判断才更稳。
如果你在评估更开放的声学成像应用开发方式,也可以参考中文站另一篇文章:开放式声学成像开发平台。
对常见应用场景,应该重点防哪些误报?
不同场景里,误报的高发原因并不完全一样。
- 压缩空气泄漏:重点防钢梁、柜门、地面反射,以及多条管线并行时的串扰。真泄漏通常在接头、软管、阀组连接处更稳定。
- 阀门内漏:重点防阀体外壳和周边管道的结构反射。不要只看热点位置,要结合阀前后工况与频谱一起判断。
- 电力局放或高压场景:重点防环境宽带噪声与空间反射叠加。这类场景更需要限定频段和保持安全距离,避免只凭单帧图像下结论。
快速检查清单
- 这个热点是不是贴着墙面、钢梁、柜体或地面?
- 换一个角度后,热点位置有没有明显漂移?
- 切换频段后,热点是否仍然稳定存在?
- 收紧 ROI 之后,主热点是否更集中、次级热点是否减弱?
- 热点对应的位置,是否真的存在可能的泄漏点或异常结构?
- 有没有回放、工况数据或人工复检来交叉验证?
减少声学成像误报,关键在于固定复核流程
声学成像的价值,不只是“看见热点”,而是更快判断这个热点值不值得追。理解声学反射、声学成像伪影和背景噪声的差异,能帮你把很多原本模糊的判断变成有依据的排查流程。
如果你正在评估如何把声学相机用于泄漏检测、阀门巡检或复杂工业现场排障,CRYSOUND 的 CRY8124 等设备可支持更高效的现场复核流程。需要结合你的应用场景讨论配置或测试方法,可以直接联系 CRYSOUND 团队。
FAQ
声学成像出现热点,就一定代表有泄漏吗?
不一定。热点只能说明该方向存在较强声能,不代表它一定来自目标故障。反射、伪影和环境噪声都可能形成假热点。
怎么区分反射和真实泄漏?
最有效的方法是换角度复拍,并结合几何关系判断。如果热点总是跟着视角漂移,或者总贴着大面积硬表面,反射的可能性就很高。
什么情况下更容易出现声学成像伪影?
在高反差声场、复杂背景、频段选择不合适或观察范围过大的情况下,更容易出现旁瓣、拖尾和镜像型伪影。
只看彩图能完成判断吗?
不建议。彩图适合快速筛查,但更稳妥的判断应结合频谱、ROI 调整、角度复拍、回放和工况信息。
现场有没有一个最简单的防误判动作?
有。先不要急着截图下结论,先横向移动一步再拍一次。很多反射型误报在这个动作下会立刻暴露出来。