为什么机器人巡检场景里泄漏更难及时发现
在很多工业现场,泄漏检测的难点并不只是“有没有巡检”,而是能否在合适的时间、以足够安全的方式,把真正值得处理的异常更快找出来。压缩机房、阀组区、法兰连接区、管廊和高位设备区域,往往点位分散、环境复杂,人工逐点排查效率低,也难以长期保持稳定频率。
机器人平台能够解决“到达现场”和“重复执行”的问题,但如果缺少适合泄漏定位的感知能力,机器人巡检仍可能停留在拍到画面、记录路线,却难以快速指出异常来自哪里。对现场团队来说,真正需要的是一种能把巡检、定位和后续处理衔接起来的方案。
更适合解决高频巡检中的效率问题
对于需要周期性重复巡检的现场,机器人可以承担标准化路线执行,而泄漏定位能力决定了巡检结果是否真正有用。
减少危险区域人工进入频次
在易燃、易爆、有毒或不适合人员频繁进入的区域,机器人代人巡检的价值通常不只在于自动化,更在于安全边界的改善。
哪些现场和设备更适合这套方案
这套方案更适合需要在复杂工业环境中进行高频巡检、异常初筛和泄漏点快速复核的场景。典型应用包括压缩机房、机泵区、阀组区、法兰连接区、长距离管廊以及高位或不便人工靠近的设备区域。
对于这些现场,企业往往并不是完全没有检测手段,而是缺少一种既能融入日常巡检流程、又能更直观指向异常位置的方式。方案的价值不只在于“能测”,还在于更适合做例行巡检、重点复核和平台化留痕。
覆盖多类工业巡检对象
从法兰、阀门、接口到压缩空气系统和其他带压设备,不同对象都可能存在泄漏风险,方案需要适配多样化现场。
更适合例行巡检与异常排查结合
既能用于例行巡检中的快速筛查,也能用于发现异常后的进一步定位和复核。

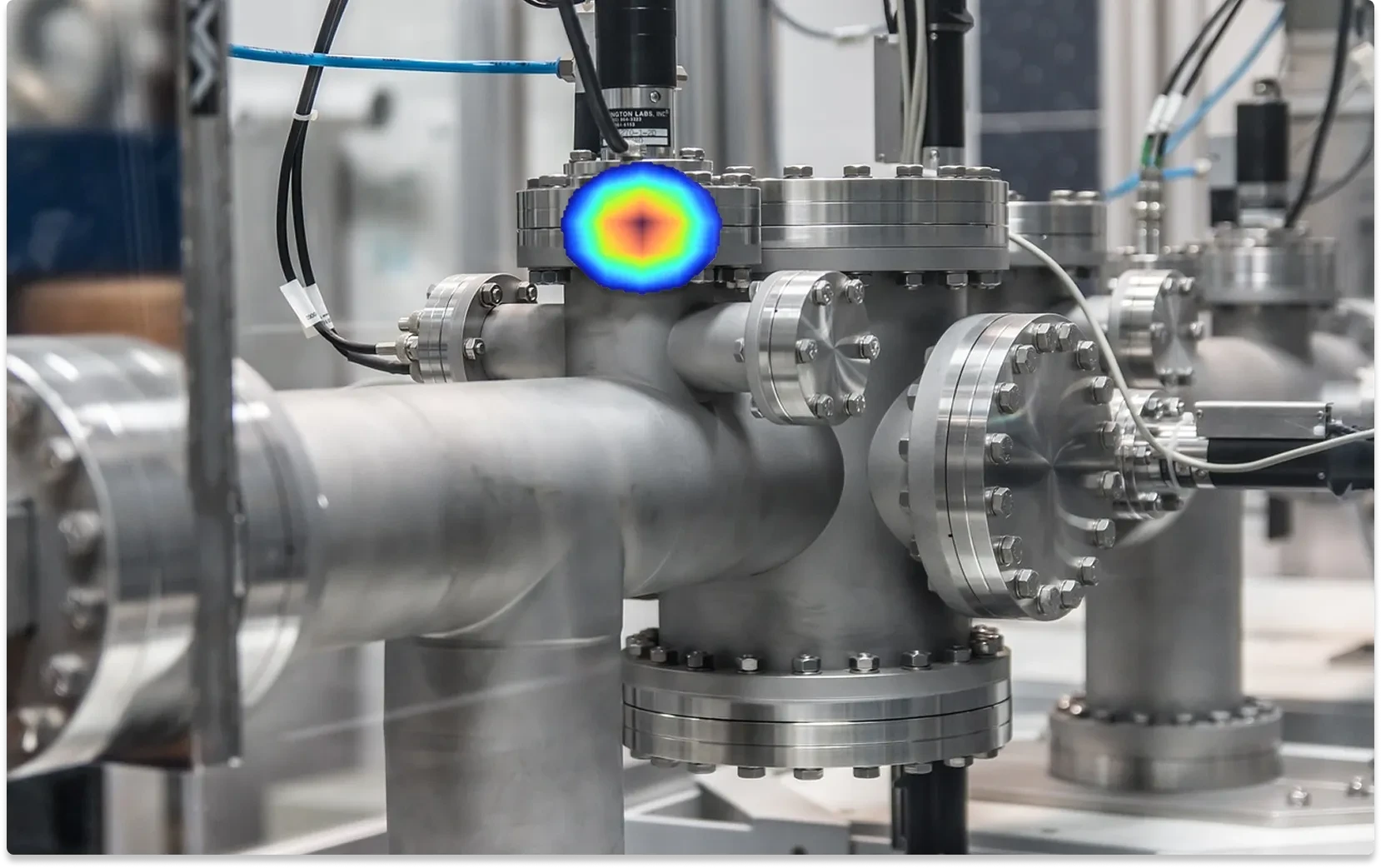
声学成像为什么适合集成到机器人巡检平台
对于带压气体和真空泄漏场景,声学成像的价值在于把原本不容易直接观察到的异常声源转化为更直观的定位结果,并与可见光画面结合,帮助现场人员更快缩小排查范围。对机器人巡检而言,这意味着不只是“走到现场”,而是可以在巡检过程中同步完成异常发现和位置确认。
这种方式尤其适合需要远距离、非接触和重复执行的场景。面对设备密集、结构复杂或不适合人工长时间停留的区域时,声学成像更容易帮助团队先把问题看出来、记下来,再决定是否需要安排进一步处理。
泄漏定位更直观
将异常声源位置以更可视化的方式呈现出来,有助于减少反复试错和无效复核。
更适合融入机器人巡检流程
当定位结果可以随巡检任务同步输出时,机器人巡检就更容易从“采集数据”升级为“输出可行动线索”。

为什么复杂现场不能只看声像,还要结合报警与历史记录
在真实工业现场,巡检工作并不是看到一次异常就结束。现场噪声、设备运行状态和空间结构,都可能影响一线人员对异常的理解。如果只有一张声像图,而没有报警记录、任务上下文和历史数据支撑,异常结果就很难顺利进入后续处理流程。
这也是为什么平台侧的报警、记录和历史追溯很关键。它们的价值不是替代现场判断,而是帮助团队把一次巡检发现转化为可以复核、可以讨论、也可以持续跟踪的问题线索。
让异常信息更容易被复核
当异常伴随时间、位置和对应记录一起保存时,团队更容易确认问题是否需要继续处理。
让巡检结果不只停留在现场画面
相比一次性的检测结果,带有记录和追溯能力的信息更适合进入班组协同、上报与后续管理。

从现场发现到复核上报,如何形成巡检闭环
一套可落地的机器人巡检气体泄漏检测方案,不应只停留在发现异常这一步。对现场团队而言,更关键的是:发现之后能否及时保存记录、能否远程查看、能否支持上报沟通,以及能否帮助安排后续处理动作。
当机器人巡检、泄漏定位、报警通知和历史数据管理能够放在同一条流程里时,巡检结果就更容易从个人发现转化为团队可协同处理的问题线索。这类能力的意义,不是替现场直接给出最终结论,而是帮助团队更高效地完成异常记录、问题复核和后续处理闭环。
支持更高效的巡检闭环
从现场发现、报警记录到结果回看,解决方案应服务于日常巡检流程,而不是只提供一次性的检测画面。
帮助运维团队协同处理
当异常信息能够被更清晰地记录和传递时,团队就更容易讨论下一步如何安排复核与处理。